overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
pre-informe L5, laboratorio de fisica
University of Iceland presentation template for slides using Beamer. Can be configured to use different colors for the different schools of University of Iceland.
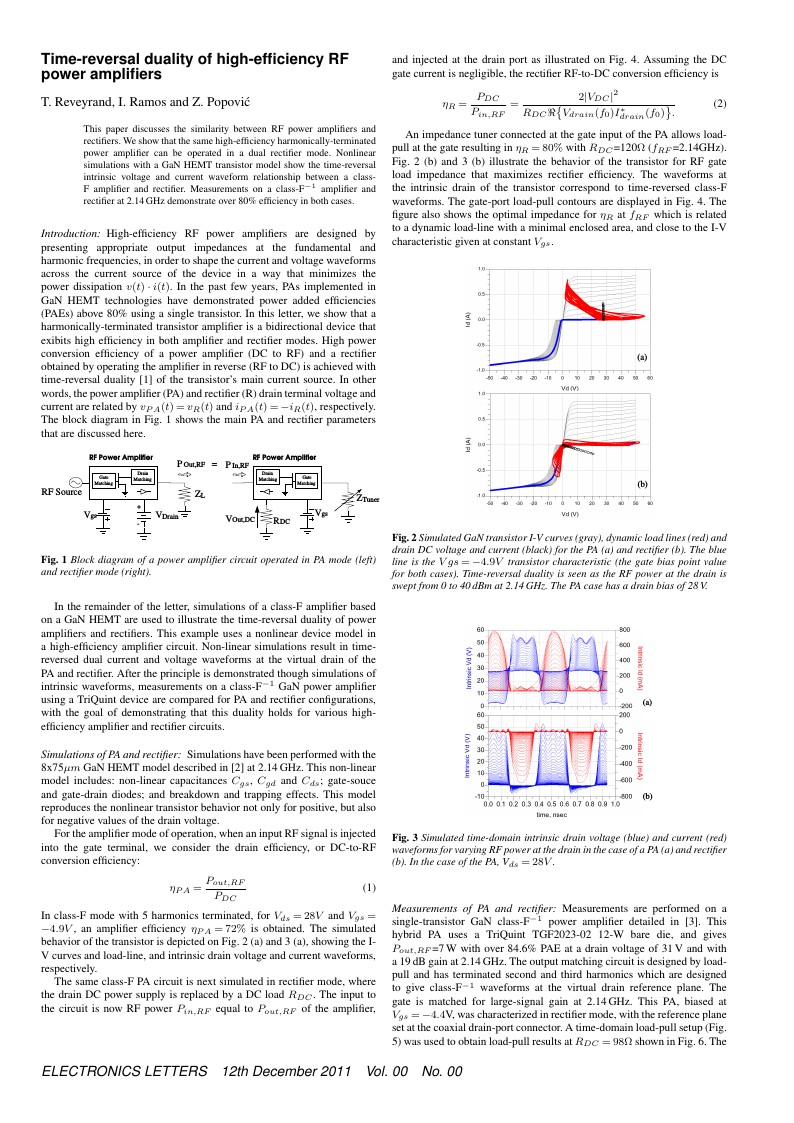
With Overleaf, edit online instantly this IET Electronics Letters Journal example and download a PDF version. This project is also available on my web site

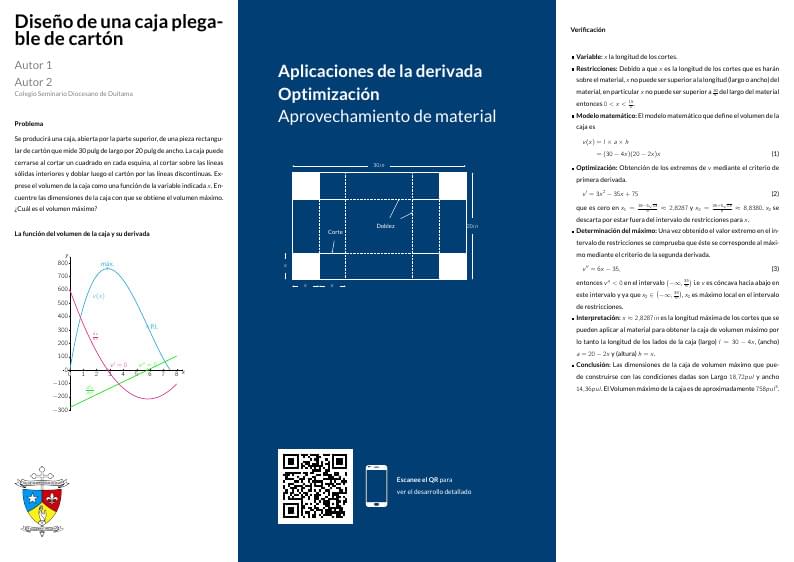
Poster to present results on derivative apps
A good way to improve LaTeX skills is to write classroom assignments and reports in LaTeX. This template can help you get started. Feel free to suggest improvements at vishal dot sharma at aggiemail.usu.edu

Scientific investigation

Official template for the submission of an abstract for a talk or a poster to the 28th Annual Meeting of the RSSB.
Eddie Boy G. Geslani's CV
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.