overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
Research Methodology Manuscript Template
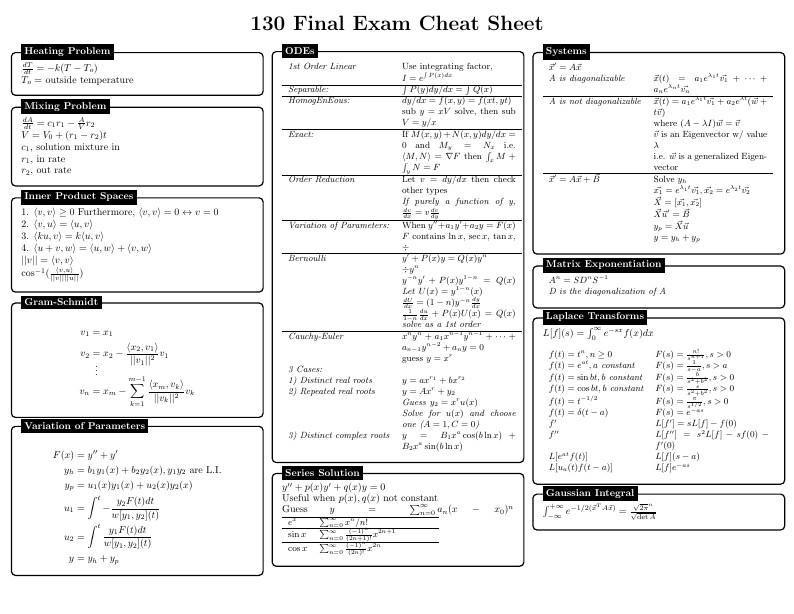
Cheat sheet for Linear Algebra and Differential Equations
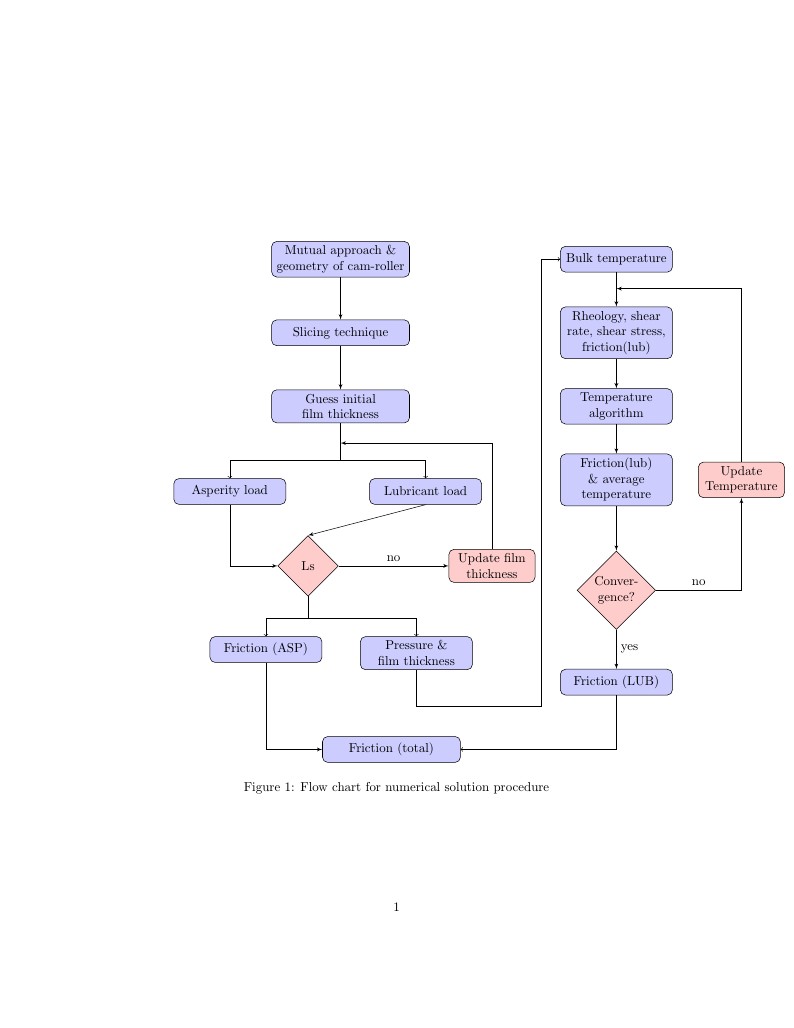
A little bit more advanced flowchart than the simple flowchart example at: http://www.texample.net/tikz/examples/simple-flow-chart/
A template to create a mental health resource sheet for a students in your course.
Migrated from https://ctan.org/pkg/refman

This is the template, originally written by Dr. Tom Heinzl, which we use for group projects in the final year of Mathematical Science degrees at the University of Plymouth. I have modified the example to use BibTeX.
Resumo do Capítulo 7. Semantic Web Services; Dieter et al;Springer; London-New York, 2011.

LaTeX template for theses published at Simon Fraser University (SFU). This template was originally published on ShareLaTeX and subsequently moved to Overleaf in November 2019.
Zvanični template za završne radove drugog ciklusa )master) na Elektrotehničkom fakultetu Univerziteta u Sarajevu
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.