LaTeX templates and examples — Spanish
Recent

Presentación Básica UNIAJC
Plantilla para protocolo ITSOEH
Plantilla para proyecto final de la facultad de ingeniería de la UCC
Plantilla de Tesis de la Maestría en Negocios y Tecnología (MBT) . Posgrado autorizado por CONEAU y conforme a las recomendaciones del MOT (Master Of Technology) A BODY OF KNOWLEDGE FOR MANAGEMENT OF TECHNOLOGY (MOT-BOK) Rias J van Wyk EU Standard
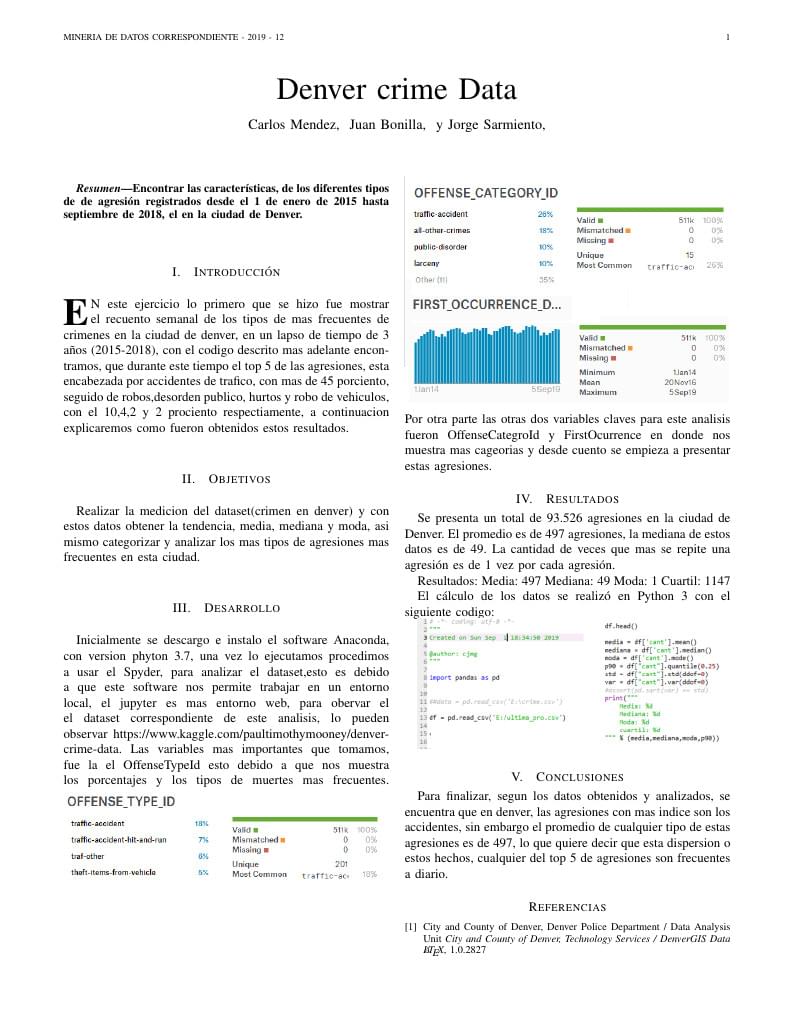
Encontrar las características, de los diferentes tipos de de agresión registrados desde el 1 de enero de 2015 hasta septiembre de 2018, el en la ciudad de Denver.
Plantilla para los proyectos de CA-403
TRABAJO REALIZADO PARA LA MATERIA DE ANÁLISIS Y DISEÑO DE SISTEMAS

In this practice, the student will implement a four-bit counter using the 74LS193 Integrated circuit (IC), and the NE555 IC as clock signal.
Template for homework (tareas in spanish), for students. Based in Latex, with logo title and more.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.